
La locomoción de la Hormiga Arriera Atta cephalotes es el resultado de una compleja coordinación de movimientos de sus seis patas.
El movimiento o trayectoria de cada una de sus patas durante la marcha es cíclico, y puede descomponerse en dos etapas:
- ETAPA DE ATAQUE (En ingles Swing o Return Stroke). En esta fase cada pata sigue una trayectoria sin apoyo (viajando por el aire) , y en sentido del movimiento del individuo. En vista lateral , cada pata sigue una trayectoria aproximadamente parabolica, con una altura maxima (normal desde el piso) alcanzada hacia la mitad de la etapa de ataque y con un recorrido que va desde una posición extrema posterior (PEP) hasta una posición extrema anterior (AEP), ver Fig. 1.
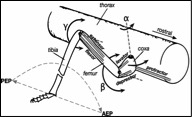
Fig. 1. Los músculos Protactor-Retractor, Elevador-Depresor y Flexor-Extensor gobiernan los segmentos sobre los cuales se insertan distalmente , proporiconandole a dichos elementos movimientos de rotación sobre un único eje. Así, cada pata cuenta con 3 grados de libertad principales, a los cuales se deben adicionar los grados de libertad que le otorgan las articulaciónes Tibia-Tarso1 y demás articulaciones inter-Tarsales. ). Fuente: SCHILLING et.al, 2013
- ETAPA DE EMPUJE (En Ingles Stance o Power Stroke). Durante toda la etapa el punto de apoyo está en en contacto con el piso aplicando una fuerza opuesta a la dirección de avance del individuo. La trayectoria del punto de apoyo (Tarso) relativa al cuerpo vista es y lineal , desde AEP a PEP, paralela al eje de movimiento corporal, lo cual es logrado con una combinación única de valores de ángulos β y γ para cada valor de avance α definido por el par muscular protactor-Retractor. En la trayectoria lineal, paralela al eje corporal, la fuerza aplicada para el avance corporal es aprovechada en su totalidad, en oposición a una trayectoria circular, correspondiente a modelos robóticos de 12 grados de libertad (articulaciones Torax-Coxa y Coxa-Trocanter dinámicas, con articulación Femur-Tibia estática), en las cuales la fuerza es aplicada tangencialmente al semicírculo de recorido, con solo su componente vectorial de fuerza paralelo al eje corporal Fy aprovechable, ver Fig.2. .
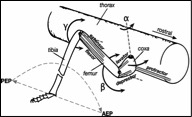

Fig. 2. Descomposición vectorial de la fuerza aplicada por cada pata P para empuje corporal, sobre una trayectoria circular (sin compensación de trayectoria). Solo la fracción Fy de la fuerza aplicada F es aprovechable para la locomoción. Adicionalmente, el rozamiento minimiza aún mas la fuerza efectiva Fy aprovechable.
Durante la etapa de empuje, cada pata se apoya sobre los cuatro últimos segmentos del Tarso, a manera de pié. El primer segmento tarsal normalmente se alinea con la Tibia, proporcionando al sistema una mayor longitud de ataque-empuje.
Puesto que los músculos Protactor y Retractor que controlan la articulación Torax-Coxa, generan un ángulo de Paneo (PAN), mientras que los músculos Elevador y Depresor que controlan la articulación CT (misma Figura) generan un ángulo de elevación TILT del Fémur, la evolución de estos dos ángulos a lo largo del tiempo definen la posición espacial (x, y, z) del extremo distal del femur, el cual se combina con la evolucion de los valores del ángulo Femur-Tibial para definir la evolución espacio-temporal del punto de apoyo.
RITMO DE MARCHA:
Para lograr un movimiento corporal efectivo, los movimientos de las seis patas deben coordinarse con un ritmo y una velocidad de ritmo (frecuencia) que garantize un resultado final medido en valores de avanze, giro, retroceso y velocidad de individuo.
Modelos teórios como los citados por Schilling (2013) y Cruse(1998) se fundamentan en la Red Neuronal Walknet , un modelo distribuído que opera mediante una serie de reglas de condición entre patas adyacentes.
La validez biológica de dicho modelo es discutible, aunque a nivel neuronal es cierto que al menos el ritmo de movimiento de las patas parece estar gobernado por los tres pares de ganglios toráxicos, y no por el cerebro central.
En cualquier caso, en la Hormiga Arriera (y en la mayoría de los insectos), un ritmo trípode , con empuje simultaneo en pata delantera, trasera y central del lado opuesto , Fig. 3, es el caso mas común:

Fig. 3. Ritmo trípode. Los puntos indican las patas en contacto con el piso (etapa de empuje) a lo largo de la línea de tiempo. IF= Izquierda frontal, IC=Izquierda central, IT= Izquierda trasera, DF, DC y DT las correspondientes patas derechas.
Visto de una manera mucho mas global, el mecanismo de marcha de los insectos es realmente “Bípedo”, con apoyo alterno de las dos unidades trípodes, ilustradas en la fotografía 1 por los triángulos amarillo y azul , los cuales se alternan su función (Ataque y Empuje).

Fotografía 1. Triángiulos de apoyo durante la etapa de empuje. La distancia extendida del punto de apoyo al eje corporal en el par central (ver APERTURA D en la definición de parámetros) , maximiza el area de dichas superficies triangulares, otorgándole al cuerpo una gran estabilidad durante la marcha.
PARÁMETROS QUE INTERVIENEN EN EL MECANISMO DE MARCHA :
PAN (α) : Angulo del femur en el plano XY, controlado por los músculos Protactor-retractor insertados entre Coxa y Trocanter. expresa el movimiento del femur sobre el plano XZ.
PAN_0 : Angulo de inicio de ataque, o final de recorrido, considerando 0º el ángulo comprendido entre el eje corporal y el femur,en el sentido de las manecillas del reloj (Fig. 4).
RECORIDO PAN DE FEMUR (R): Angulo cubierto por el femur en el plano YZ., medido desde PAN_0 hasta la posición final de ataque. El valor de R es igual tanto en trayectoria de ataque como de empuje.

Fig. 4. Parámetros sobre el plano XY, definidos por los músculos Protractor-Retractor. El segment BO (en rojo) representa la posición del femur en algún lugar del recorrido. DO corresponde a la posición final de ataque, AO la posición inicial, AOD el recorrido de Paneo.CO corresponde a la posición de máximo Tilt (ver Fig. 7), no necesariamente simétrica en AOD.
RECORRIDO DE PATA (N): Angulo medido desde inserción de coxa a punto de apoyo. Es la resultante de los valores definidos para r todos los parámetros de cada pata.
TILT (β) : Angulo de elevación del femur, controlado por los músculos Elevador-Depresor insertados entre Trocanter y extremo proximal del Fémur., expresa el movimiento del femur sobre el plano XZ. Ver Fig.. 5

Fig. 5. Parámetros sobre el plano Plano YZ., definidos por los músculos Elevador-Depresor (β) y Extensor-Flexor (γ). ( El segmento BO (en rojo) representa la posición del femur en algún lugar del recorrido. DO corresponde a la posición de maxima elevación de femur, AO representa la posición de minima elevación.
RECORIDO DE TILT (S): Angulo total de cubrimiento del femur en el plano YZ.
TILT_0 : Angulo comprendido entre la Normal al piso y la posición de femur a inicio de ataque.(Fig. 5. y Fotografía 2.) Para un ángulo Fémur-Tibial constante, entre menor el ángulo TILT_0, mayor la elevación corporal.

Fotografía 2. TILT_0 Del par central. Nótese también el apoyo “en punta de pié”, en busca de agarre por los espolones o espuelas tibiales insertadas en el ultimo segmento Tasrsal. Esta posición se dá en superficies de difícil agarre y que no requieren maximizar la superficie de apoyo, en comparación de superficies blandas (gravas, lodos), donde el apoyo se dá sobre los cuatro ultimo segmentos tarsales.
ANGULO FEMUR-TIBIAL (γ) : Gobernado por los músculos Flexor-Extensor, define la apertura de la Tibia.
APERTURA D: Distancia comprendida entre inserción Coxal y apoyo de Tarso, medida normal al eje corporal. Esta medida es diferente para cada par de patas, siendo maxima en el par central. Ver Fotografía 3.

Fotografía 3. Apertura D de cada par de patas. Nótese la apertura extendida del par central comparada lon la de los otros dos pares. Esto garantiza un triángulo de apoyo extendido, muy estable durante la marcha. Puesto que en Atta las inserciones coxales son ventrales, muy cercanas al eje corporal, ver Fig. 13, , los valores de D se pueden calcular desde el mismo eje. Valores medidos: D1: 3 mm, D2: 7 mm, D3: 4 mm para una longitu corporal de 9 mm.
ALTURA H: Distancia comprendida entre el piso y la inserción coxal, medida normal al piso. Ver Fotografía 4.

Fotografía 4. Altura H medida desde la superficie de marcha hasta el plano abdominal (inserción coxal en plano XY). Distancias medidas: H=2,9 mm, altura corporal A (plano dorsal en mesosoma a plano abdominal:1,8 mm
LONGITUD DE TIBIA T. Medida en línea recta entre los dos extremos del elemento. Es diferente y específico para cada par de patas.
LONGITUD DE FÉMUR F. Medida en línea recta entre los dos extremos del elemento. Es diferente y específico para cada par de patas.
PERÍODO P: Tiempo de el ciclo de ataque (o empuje). Define la velocidad de marcha.
DISTANCIA INTERCOXAL: En sí misma no contribuye de manera directa al mecanismo de locomoción, pero si define los valores de PAN_0 de patas delanteras y traseras.
En los insectosPalo (Orden Phasmida) , bastante utilizados como modelos robóticos, las distancias intercoxales son amplias, gracias a la elongación del Mesosoma que los caracteriza. Las distancias Intercoxales son comparablse en magnitud a la distancia de recorrido R de Paneo, lo cual permite que los patrones de movimiento de los tres pares de patas sean similares. En estos casos, la dinámica de movimiento de la Tibia se reduce, permitiendo que el ángulo Fémur-Tibial permanezca “Relativamente” invariante.
A diferencia de los insectos Palo, las hormigas presentan distancias intercoxales reducidas. Estas distancias son considerablemente menores en magnitud a la distancia de recorrido R de Paneo, lo que implica, que el ángulo PAN_0 de las patas delanteras avance y el de las patas traseras retroceda.. Adicionalmente, el papel de las Tibias en la trayectoria de avance se hace fundamental, de manera que avances y retrocesos Tibiales extendidos compensan un avance limitado de Fémur. Adicionalmente, la elongacion de Tibias y Metatarsos amplifican el resultado de avance.


{kind=link}